Neneco-FreeRTOS-On-RPI4B
Neneco project is an unofficial port of FreeRTOS for Raspberry Pi 4 Model B.
View the Project on GitHub D3boker1/Neneco-FreeRTOS-On-RPI4B
Neneco
> Version: Neneco - 1 Tomoe Sharingan (v0.1)
Neneco project is an unofficial port of FreeRTOS for Raspberry Pi 4 Model B. Neneco provide an abstraction layer in order to make the development of programs on RPI4B with FreeRTOS as easy as possible. This project began when the main developer needed to create a program with real time requirements and as constrains the RPI4B board.
Why Sharingan names?
As said before, Neneco emerge from the need to develop a real time application. This project it is called Susanoo (Tribute to Susanoo from Naruto and not the Japanese God). Susanoo project is a mixed criticality application on automotive sector. The goal of Susanoo is reducing the number of ECU’s inside a vehicle. To achieve that, strong virtualization techniques are being used, like a hypervisor to provide spacial and temporal isolation between the critical and non-critical subsystems. Thus, Neneco is the critical subsystem of Susanoo. The main goal is developing Neneco until Mangekyō Sharingan, the only sharingan able to invoke Susanoo.
Available Drivers
On currently version the supported drivers are:
- GPIO
- GCI-400 (Interrupt controller)
-
UART
The driver only implements UART2. In further versions will be added suport to all UART’s.
-
I2C
The driver only implements I²C device 1. In further versions will be added suport to all I²C devices.
-
SPI
The driver only implements SPI device 0. In further versions will be added suport to all SPI devices.
-
PWM
The driver only implements PWM device 0 channel 1. In further versions will be added suport to all PWM’s and channels.
-
GPIO Clock Manager
The driver only implements PWM clock. In further versions will be added suport to all clocks.
Extra
Neneco implements some drivers for board comonly used in projects. For now, neneco give support to:
-
ADS1115
A four ADC channel to I²C.
-
L298N
A dual H-Bridge motor driver which allows speed and direction control of two DC motors at the same time.
To-Do List
The to-do list is in order by priority.
- [O] Implement a ELM327 driver; (In Progress)
- [O] Implement a buil-in interpreter; (In Progress)
- Implement a shared memory module (to give support to communication between guest in multi-guest implementations);
- Scale the UART driver to all UART devices;
- Scale the I2C driver to all I2C devices;
- Scale the SPI driver to all SPI devices;
- Scale the GPIO Clock Manager driver to all GPIO Clock devices;
- Scale the PWM driver to all PWM devices;
Organization
Neneco is divided into two folders: FreeRTOS_port and RPI4_drivers.
The FreeRTOS_port contains all the necessary files for the raw FreeRTOS port. Thank you eggman for the amazing job!
The RPI_drivers contains the drivers to give support to RPI4B, contains the main application as well, but the location of main application can be changed.
Main application
The available main file, always provide a complete test over the implemented drivers. Thus, the version 1 Tomoe Sharingan provide a complete test over the drivers specified above. To test a specific driver, the only thing to do is uncomment the driver function on main function. But this is covered later.
Pre-requisites
To be able to compile and use Neneco project, some tools are needed. The approach explained here is not unique! But it is, probably, the easier one.
Building a Default Image.
So, this project need U-Boot to run. In order to obtain this and the image for the RPI4B Buildroot will be used.
-
Install Buildroot
git clone https://github.com/buildroot/buildroot.git -
Default configuration list
make list-defconfigs -
Select a default configuration for RPI4B 64 bit
make raspberrypi4_64_defconfig -
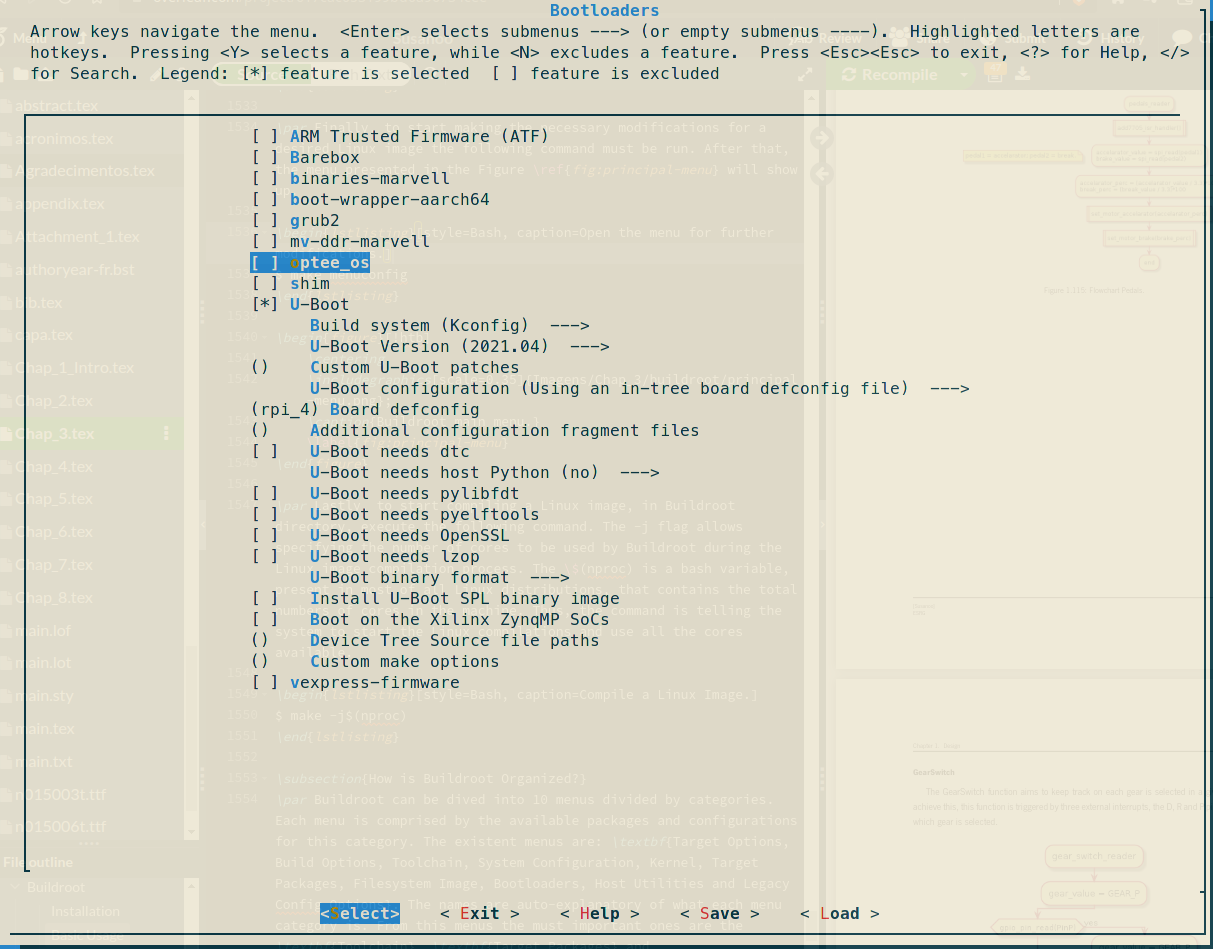
Open the menu for further modifications
make menuconfig -
Select U-Boot as bootloader (Bootloaders -> U-Boot). In Board defconfig write: rpi_4
-
Compile the image
make -j($nproc) -
Flash the SD card with the compiled image
-
Change the name of u-boot.bin to kernel8.img
-
UART1 configuration
This UART is used to interact with the U-Boot. To enable this UART in the config.txt write enable_uart=1
Building the Cross Compiler
In order to compile Neneco a cross compiler must be used. You can use the toolchain created by Buildroot when you compile the Linux image, or you can use a different compiler.
I will use the AArch64 ELF bare-metal target because I need Buildroot for other projects.
Do the download in: https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-a/downloads
How to use Neneco
-
Clone the repository
git clone https://github.com/D3boker1/Neneco-FreeRTOS-over-rpi4.git -
Go to the Makefile and change the CROSS_COMPILER for your compiler.
-
Go to the folder ‘neneco’. Compile Neneco.
make -
Copy the neneco.elf file to the boot partition of your SD card.
-
Put the card on RPI4B and power up!
Now, wait until U-Boot start printing the boot process. When it appears, click in some key quickly. The U-Boot prompt should appear.
Write the following commands to start running Neneco.
dcache off
fatload mmc 0 0x28000000 neneco.elf
dcache flush
bootelf 0x28000000
- Depending on what you uncomment in main file, probably you have messages on UART2.
Demo
You can see the Neneco demo in demo page
Documentation
This project is being documented at the same time as it is being developed. However, some drivers are not documented yet, and it is not the most priority task at the moment.
Support
Use the Github Issues to report any type of issues or problems! Feel free to help me improving Neneco!
Francisco Marques,
University of Minho